Static Mapping: Car Data
Contents
Static Mapping: Car Data#
As a brief introduction into static mapping, this quick demonstration uses perceptual attribute ratings to uncover competing cars’ relative positioning.
Background#
The data is taken from the following book (with slight modifications):
[1] Lilien, G. L., & Rangaswamy, A. (2004). Marketing engineering: computer-assisted marketing analysis and planning (2nd revised edition). DecisionPro.
Last updated: September 2023
Read the full paper here (open access): https://doi.org/10.1287/mksc.2022.1385
Contact: For questions or feedback, please get in touch.
Loading Example Data#
The data for this example consist of two files:
‘attributes’: Perceptual attribute ratings for competing cars
‘preferences’: Customer preference ratings for these cars
Both files are included within the evomap.datasets module.
from evomap.datasets import load_car_data
data = load_car_data()
df_attributes = data['attributes']
df_preferences = data['preferences']
We start by inspecting the attribute data. These data include attribute ratings for the following 10 competing cars:
car_labels = df_attributes.index
car_labels
Index(['G20', 'Ford_T_Bird', 'Audi_90', 'Toyota_Supra', 'Eagle_Talon',
'Honda_Prelude', 'Saab_900', 'Pontiac_Firebird', 'BMW_318i',
'Mercury_Capri'],
dtype='object', name='Car')
Each car has been rated along 15 perceptual attributes.
df_attributes.columns
Index(['Attractive', 'Quiet', 'Unreliable', 'Poorly.Built', 'Interesting',
'Sporty', 'Uncomfortable', 'Roomy', 'Easy.to.Service', 'High.Prestige',
'Common', 'Economical', 'Successful', 'Avant.garde', 'Poor.Value'],
dtype='object')
Each attribute value represents averages of a customer survey:
df_attributes.loc['G20']
Attractive 5.6
Quiet 6.3
Unreliable 2.9
Poorly.Built 1.6
Interesting 3.6
Sporty 4.1
Uncomfortable 3.2
Roomy 4.2
Easy.to.Service 4.6
High.Prestige 5.4
Common 3.5
Economical 3.6
Successful 5.3
Avant.garde 4.3
Poor.Value 3.4
Name: G20, dtype: float64
Derive Car Positioning#
To project these 15-dimensional vectors for each car onto the two-dimensional plane, we can use Classical Multidimensional Scaling (CMDS). CMDS, also known as Principal Coordinates Analysis, takes a matrix of pairwise distances, and creates a low-dimensional configuration of points via Eigendecomposition of the distance matrix.
Thus, as a first step, construct a pairwise distance matrix:
from evomap.preprocessing import calc_distances
dist_mat = calc_distances(df_attributes)
dist_mat.round(2)
array([[0. , 5.28, 2.93, 3.48, 5.75, 2.7 , 3.11, 6.08, 2.29, 5.59],
[5.28, 0. , 4.42, 4.75, 2.28, 4.35, 4.98, 1.82, 5.67, 1.97],
[2.93, 4.42, 0. , 4.58, 5.25, 3.76, 2.76, 5.39, 3.21, 5.1 ],
[3.48, 4.75, 4.58, 0. , 5.46, 3.51, 3.95, 4.73, 3.41, 4.91],
[5.75, 2.28, 5.25, 5.46, 0. , 4.26, 5.35, 3.01, 6.19, 0.99],
[2.7 , 4.35, 3.76, 3.51, 4.26, 0. , 3.27, 5.12, 3.07, 4.19],
[3.11, 4.98, 2.76, 3.95, 5.35, 3.27, 0. , 5.9 , 2.69, 5.07],
[6.08, 1.82, 5.39, 4.73, 3.01, 5.12, 5.9 , 0. , 6.34, 2.49],
[2.29, 5.67, 3.21, 3.41, 6.19, 3.07, 2.69, 6.34, 0. , 5.85],
[5.59, 1.97, 5.1 , 4.91, 0.99, 4.19, 5.07, 2.49, 5.85, 0. ]])
Then, apply CMDS to this matrix. Syntax follows the scikit-learn library:
First, you intialize the model. Then, you fit() it to data. fit_transform() directly returns the resultant output (in this case: a two-dimensional array of map coordinates).
from evomap.mapping import CMDS
map_coords = CMDS(n_dims= 2).fit_transform(dist_mat)
map_coords.round(2)
array([[-2.54, 0.04],
[ 2.43, -0.3 ],
[-1.53, -1.68],
[-1.09, 2.61],
[ 2.9 , -0.79],
[-1. , 0.11],
[-2.01, -0.98],
[ 3.1 , 0.95],
[-2.96, 0.27],
[ 2.71, -0.23]])
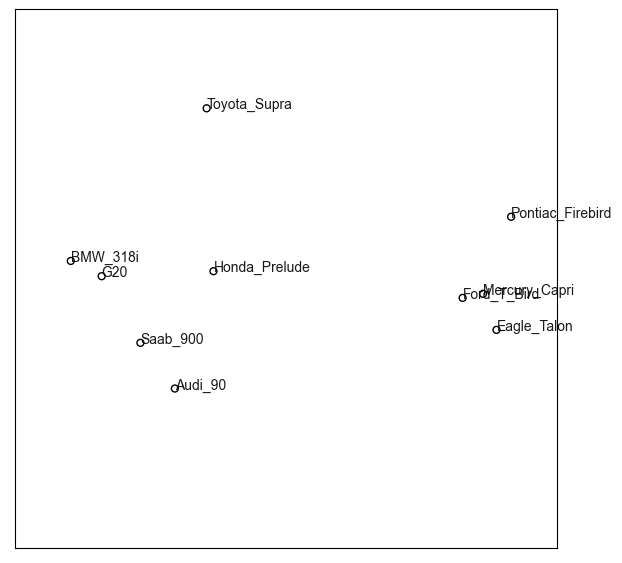
The resultant coordinates can then be visualized in a 2D map
from evomap.printer import draw_map
import numpy as np
map = draw_map(
map_coords,
label = car_labels,
fig_size = (7,7))
map
Explain Positioning via Property Fitting#
The map already reveals which pairs of products compete strongly vs. weakly. A natural next question is: What drives these positions? I.e., how do these map positions relate to the competing cars’ perceptual attributes?
To answer this question, evomap allows to fit attributes to the derived map positions (and visualize their relationship via vectors)
from evomap.printer import fit_attributes
map = draw_map(
map_coords,
label = car_labels,
fig_size = (7,7),
size = 30)
map = fit_attributes(map_coords, df_attributes, map)
map
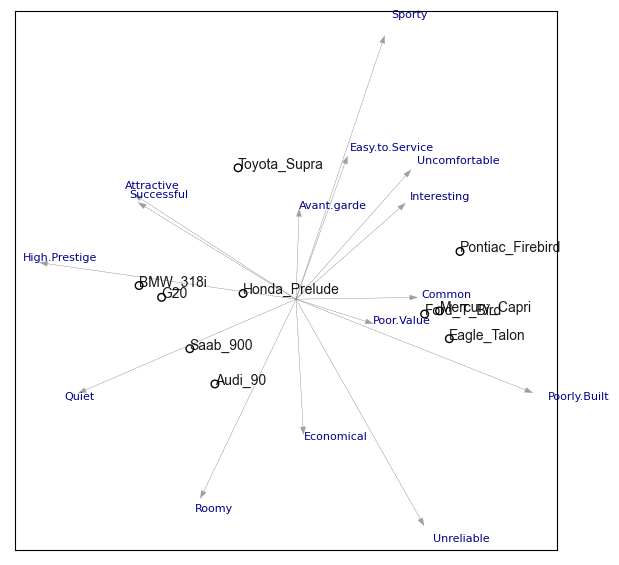
From this map, it becomes apparant what differentiates the competing car brands from one another.